Warning: file_get_contents(): SSL: connection timeout in /var/www/html/www.edw.com.cn/www/rootapp/controllersspace/ArticlesmanageController.php on line 270
Warning: file_get_contents(): Failed to enable crypto in /var/www/html/www.edw.com.cn/www/rootapp/controllersspace/ArticlesmanageController.php on line 270
Warning: file_get_contents(https://mmbiz.qpic.cn/mmbiz_png/JJtKEey0hPa8j3FCXrceG0YtkfVp6VLWdSwFmz2Wob1K6voAphhRJhJQoXQo7wDzpZpbhV7uUo7MvnoWZRrr2w/640?wx_fmt=png&tp=wxpic&wxfrom=5&wx_lazy=1&wx_co=1): failed to open stream: operation failed in /var/www/html/www.edw.com.cn/www/rootapp/controllersspace/ArticlesmanageController.php on line 270
近日,浙江大学赵朋教授团队开发了一种具有三维力解耦感知能力的新型柔性触觉磁感知器件,通过建立三维力-磁场解耦理论模型,提出柔性磁体向心磁化设计方案与折叠充磁制备方法,使该柔性感知器件兼具较好的稳定性和可重复性。
 图|论文作者(左起)戴煌哲硕士生、张承谦博士(来源:课题组)
图|论文作者(左起)戴煌哲硕士生、张承谦博士(来源:课题组)
通过此,只需依靠单霍尔传感器,就能针对空间三维力实现解耦感知。同时,他们还对传感器进行分体式设计,借此展示了磁场感知的无线传输特点。
总的来说,和其他触觉传感器不同的是,该团队仅使用一个霍尔传感单元,就实现了混合三维力的精确感知,并且无需内嵌任何电路。
这为磁触觉传感器领域带来了重要进展,不仅提高了器件性能,也拓宽了器件应用范围。
就具体应用来说:
其一,可以将这款触觉传感器用于机器人的机械臂和机械手,以为其提供三维力的触觉感知能力,从而提高人工智能的智能化程度。
同时,它能真正地为机器人提供媲美人类皮肤感知维度的感知能力。
其二,可以将这款触觉传感器用于人机接口,通过感知人的作用力来控制机器人。
其三,可以将这款触觉传感器用于密封环境下的信息感知,例如用于水下流场的分体式感知。
凭借磁场的无线传输,可以将传感器在舱内和舱外进行分体,然后安装感知层和霍尔传感器,从而以无线的方式感知舱外的流场和流速等信息。
这不仅能极大提高水下舱体的密封性,也能促进深海等极端环境下的智能机器人的发展。
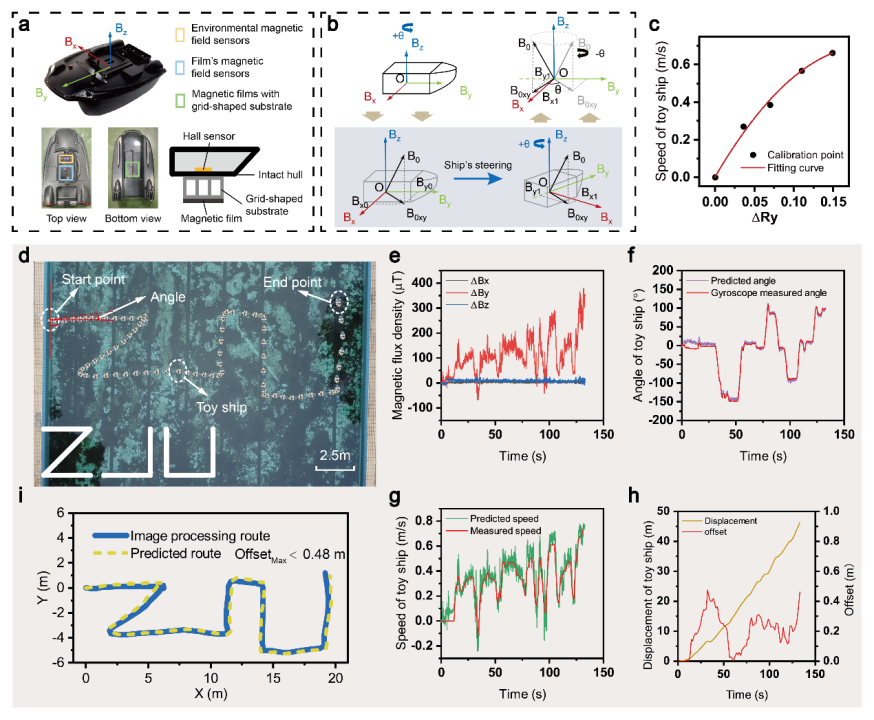 图 | 小船流速的分体式感知应用(来源:Advanced Materials)
图 | 小船流速的分体式感知应用(来源:Advanced Materials)
 从人类的生物进化说起
从人类的生物进化说起
在生物进化的过程中,人类生成了许多功能感觉器官,从而能够感知周围环境和猎物,进而让生存能力得以提高。
对于人类来说,最重要的感觉之一便是对于三维机械力的触觉感知能力,这一感知能力让人类和部分动物得以操作一些精细任务,从而能够成为优秀的捕食者。
随着算法、材料和制造等技术的不断进步,不少学者仿照人体皮肤和鱼类侧线等生物感受器,开发了多种人造触觉传感器,增加了机器人的交互性、适应性和智能性。
目前,大多数研究专注于实现传感器的高精度感知和高响应速度。就多维感知领域而言,大多数研究都围绕机械阵列结构开展,但是这会给设计和装配带来一定难度。
整体来看在感知维度上,已有传感器存在一定的缺失,导致难以真正地实现人体皮肤的感知功能。
比如,当传感器面对三维力信号的时候,往往会出现信号干扰的问题(即信号耦合)。
这就好像一个人能听懂英语、也能听懂汉语。但是,如果同时听到英语和汉语,就很难将这两种语言信息进行单独的解析。
力传感也是这样,即不同方向的力会产生耦合信号。这时,如何将这些力信号准确地分解出来?
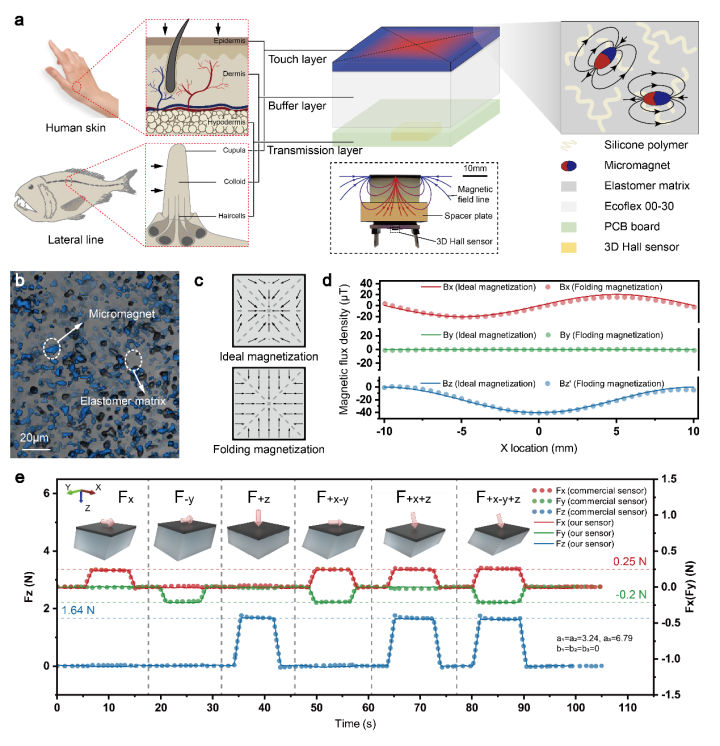 图 | 对环境中力信号的触觉感知是生物的基本能力(来源:Advanced Materials)
图 | 对环境中力信号的触觉感知是生物的基本能力(来源:Advanced Materials)
对于当前柔性触觉传感器来说,当它在检测多个方向的力时,需要在三轴方向分别布置一个力传感器。
然后,通过设计相关的算法,将三个方向的力信号进行解耦(即算法解耦)。当然,也可以采用精巧的结构设计,让三个方向上的力感知互不影响(即结构解耦)。
但是,这两种方案都是基于电信号的传递,而精细的结构和电路设计会不可避免地增加传感器复杂度,因此会增加制造难度与周期。
那么,能否绕开这些设计,用更轻巧的方法实现力的感知?
因此,课题组开始思考:能否利用磁场信号来对力进行感知?也就是把一个柔性磁铁做成力感知层,在它的下方放置一个三维磁场传感器。
这时,有了磁场信号就能计算柔性磁铁的在力作用之下的移动,从而算出力的大小。
同时,基于磁场感知的触觉传感器,在物理鲁棒性和多维感知上具有独特的优势。
由于磁场无线传输的存在,因此受力感知的部分无需包覆任何线缆或刚性器件,故可以摆脱对于引线的依赖,从而实现感知层与信号接收器的无线安置,借此大大增加传感器的灵活性。
在柔性磁体的加持之下,受力部分是完全柔性的,具有极强的物理鲁棒性和稳定性。
作为一种需要频繁接受力和接受冲击的器件,触觉传感器的内部采用既复杂、又精细的电路与结构,因此会极大降低传感器的鲁棒性。
而对于人造触觉传感器来说,尽管它里面的电路非常精细,但是并不会像人体末梢神经一样具备自修复功能。所以,目前仅具备复杂阵列与机械结构的触觉传感器,很难得到大范围的应用。
随着磁场传感器的发展,霍尔传感器已能凭借较小的体积,来感知空间内的磁场矢量。
因此,相比传统的电触觉传感器,现有的霍尔传感器可以获取更多信息,从而具备感知多维力的可能。
此前,学界已经提出不少多维感知的方案,然而大都通过多点拟合和机器学习等方法实现。
不仅标定过程十分复杂,而且一旦磁体的初始位置发生偏移,多维感知立马就会失效,这极大限制了器件的批量生产和应用。在此基础之上,课题组开展了本次研究。
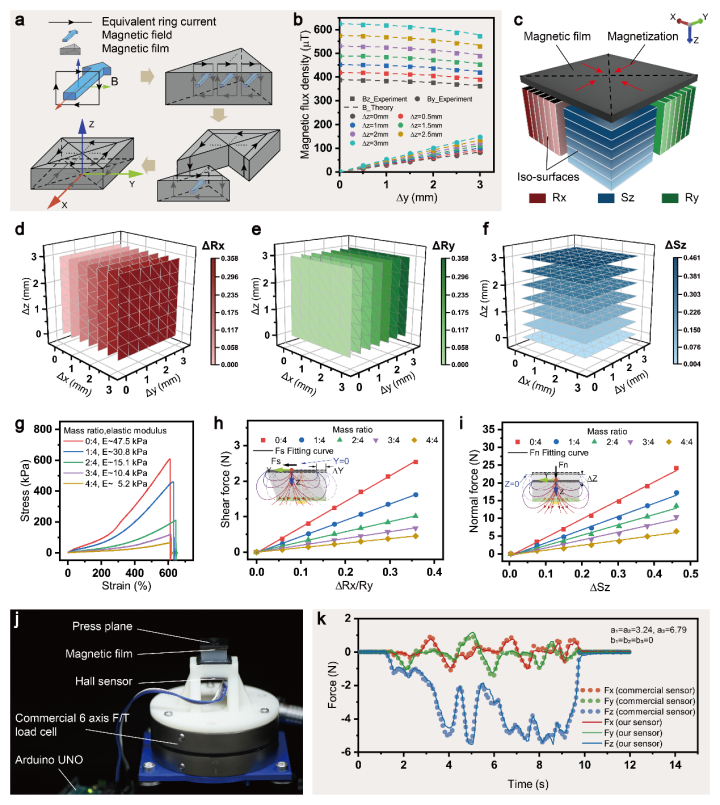 图 | 柔性磁体的三轴解耦效果(来源:Advanced Materials)
图 | 柔性磁体的三轴解耦效果(来源:Advanced Materials)
 让三维解耦的感知偏差均小于 2.8%
让三维解耦的感知偏差均小于 2.8%
此前,该课题组一直在做磁操控的相关研究,即利用外部变化的磁场去控制磁软体结构运动。
那么,能否反其道而行之,利用磁软体结构所产生的磁场变化,将运动信息反演出来?
当时,他们只是希望在磁传感方面有所拓展,即基于磁信号的力感知,赋予机械臂以触觉感知的能力。
后来,他们使用数据拟合的方式实现了二维力的单独感知,并在 3D 打印的机械臂上实现了不同尺寸物体的分拣。
该团队的戴煌哲同学是本次研究的主要负责人之一。当他进入研究生阶段之后,张承谦希望培养他的科研素养。
于是,他们又在磁触觉传感器领域深入挖掘,借此发现多维力感知是磁触觉传感器的一个巨大优势。
对于一般感知方式来说,它只能感知到一维电信号。而磁触觉传感器中的三维霍尔传感器可以获取三维的磁场信号。
同时,本次使用的磁膜磁化方式是向心对称的,于是他们提出了三维力解耦感知的设想。
为了验证上述设想,起初他们打算通过建立磁膜周围的三维磁场分布模型,然后反解得到三轴位移的磁场表达式,以此来实现三维解耦。
尽管磁场分布的建模比较顺利,但在实操中他们发现相关公式极其复杂,而且反解难度也非常大。因此他们决定从磁化方式入手,寻找易于反解的磁化分布模型。
2022 年冬天,在世界杯刚刚结束的那段日子,张承谦在家里推算了 7 天之久,在尝试多种磁化分布方法之后,他终于找到了理想的磁极分布:平面正交正弦磁化。
在这种磁极分布方式之中,对于柔性磁体内部的不同位置来说,它们的磁极方向、磁极大小均不相同,因此制备难度较大。
后来,他和团队使用折纸方式来对柔性磁体进行磁化,从而让柔性磁体具备向心对称的特征。
仿真结果和实验结果证明:通过这种方法制备的向心对称样品,依旧具有极高的解耦性能,并且所制备的柔性磁体非常稳定。
为了确保解耦性能,他们还对向心对称的磁化分布和解耦公式进行推导和优化,让三维解耦的感知偏差均小于 2.8%。
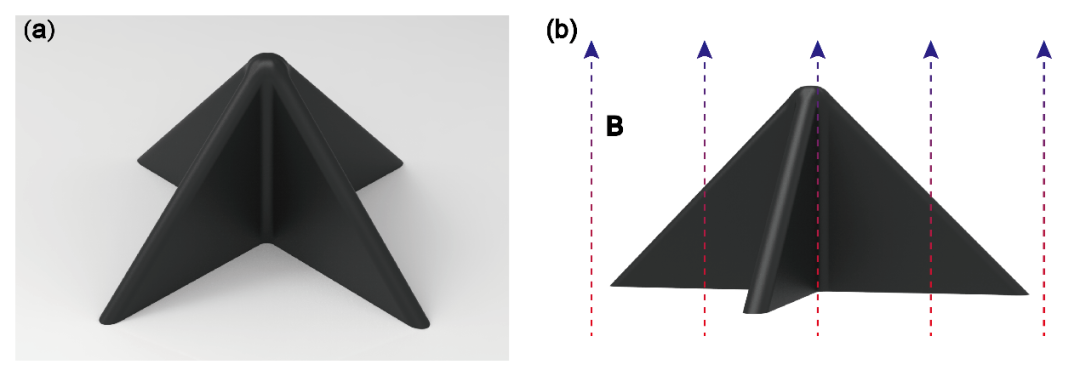 图 | 折纸充磁方法(来源:Advanced Materials)
图 | 折纸充磁方法(来源:Advanced Materials)
而在做船只导航的 Demo 时,他们打算做船只的运动路径感知,但是一直找不到合适的“船”。
后来,戴煌哲找到一只钓鱼用的打窝船。但是,船体比较大,一时找不到试验场地。后来,他发现学校正好有一个废弃的露天游泳池,于是就在这里做实验。
同时,尽管本次工作的研究过程比较顺利,但是投稿过程非常不顺。在第一轮投稿中,虽然课题组也给出了完备的实验结果和仿真结果,但是审稿人一直质疑三维解耦的可行性。
而在第二轮投稿中,为了进一步证实器件性能,他们将商用三维力传感器与磁触觉传感器的性能加以直接对比,借此说服了审稿人。
同时,他们还对解耦原理进行了完整的梳理,更加系统性地阐述了三维解耦的实现方式。
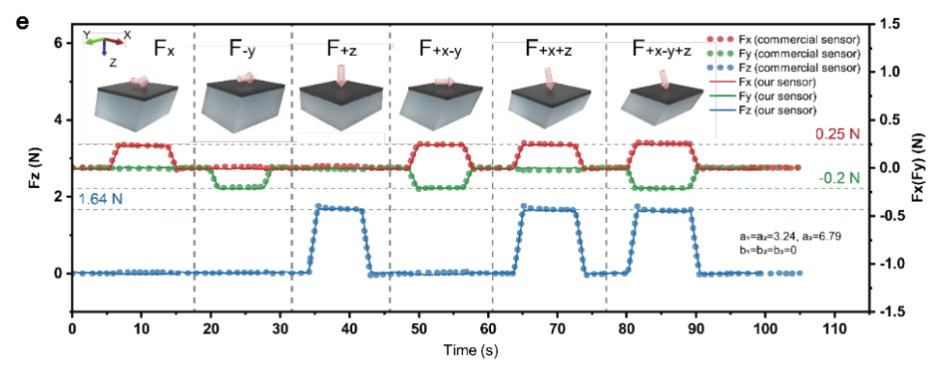 图 | 商用三维力传感器与磁触觉传感器的性能直接对比(来源:Advanced Materials)
图 | 商用三维力传感器与磁触觉传感器的性能直接对比(来源:Advanced Materials)
最终,相关论文以《具有 3D 力解耦功能的分体式磁性软触觉传感器》(Split-Type Magnetic Soft Tactile Sensor with 3D Force Decoupling)发在 Advanced Materials[1]。
戴煌哲是第一作者,张承谦担任共同一作兼共同通讯,浙江大学教授赵朋担任共同通讯作者。
 图 | 相关论文(来源:Advanced Materials)
图 | 相关论文(来源:Advanced Materials)
后续,他们将开展三方面的研究。
其一,目前的样机尺寸依旧偏大,因此需要对其进行微型化,以及开展阵列化、像素化的感知应用研究。
其二,目前的感知单元只能感知平动磁膜的三轴空间位置,虽然他们在论文补充信息中,已经讨论过磁膜倾斜与磁膜扭转对于磁膜位置感知的影响。
但是,对于磁膜本身的倾斜姿态和扭转角度等更多运动维度信息的感知,也是一个值得探讨的方向。
其三,针对感知单元在水下流场信息感知上的应用,他们也将开展更多研究,希望在这种感知原理的加持之下,能让水下机器人实现对于周围流场信息的感知。
参考资料:1.Dai, H., Zhang, C., Pan, C., Hu, H., Ji, K., Sun, H., ... & Zhao, P. (2023). Split‐Type Magnetic Soft Tactile Sensor with 3D Force Decoupling. Advanced Materials, 2310145.排版:罗以
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。