自动驾驶新势力搅局,行猩科技发布最新感知系统“APANet”,欲打造下一代无人电动运力网络
深科技 | 2022-04-04 03:46:58 阅读:940
 发布文章
发布文章
近年来,智能自动驾驶俨然已经成为了汽车行业的热门关键词,并且在全球范围内进入了高速发展期,竞争尤为激烈。 然而,在中国庞大的自动驾驶赛道面前,入局者们的发力方向却各有不同,且主要都是聚焦于某一细分技术之上,这意味着现阶段自动驾驶市场仍有较大潜力空间可供挖掘。 “中国拥有超过 16 万公里的高速公路通车里程,是全球货运量最大、最繁忙的物流市场。但在这样一个巨大的市场里,目前还没有出现一辆可真正实现商业运营的电动化智能卡车。”行猩科技天使投资人、董事,阿尔法公社创始合伙人蒋亚萌说道。
如何通过人工智能和电动化的手段,打造高效、清洁、可靠的物流服务,推动传统物流市场走向变革,也因此成为行猩科技这一自动驾驶新势力的重要目标。集结顶尖人才,行猩科技强势“闯入”自动驾驶赛道 就涉足自动驾驶领域的时间而论,行猩科技完全可以称得上是“后浪”,它成立于 2021 年,距今只有短短数月时间。 但作为一家新兴的自动驾驶新势力,行猩科技在技术层面的实力并不容小觑。据其创始人兼 CEO 赵睿璇介绍,目前,行猩科技已发布最新自动驾驶感知系统“APANet”,并计划在 2023 年量产自动驾驶纯电厢式重卡物流车。
就涉足自动驾驶领域的时间而论,行猩科技完全可以称得上是“后浪”,它成立于 2021 年,距今只有短短数月时间。 但作为一家新兴的自动驾驶新势力,行猩科技在技术层面的实力并不容小觑。据其创始人兼 CEO 赵睿璇介绍,目前,行猩科技已发布最新自动驾驶感知系统“APANet”,并计划在 2023 年量产自动驾驶纯电厢式重卡物流车。
图 | 行猩科技创始人兼 CEO 赵睿璇博士(来源:行猩科技) 而之所以能在这么短的时间内实现技术的迭代,与其强大的研发团队可谓密不可分。
据了解,行猩科技由赵睿璇博士联手前 Waymo 技术大牛王清洲联合创立。赵睿璇曾任 Pony.ai 小马智行的副总裁,帮助公司实现估值的超 10 倍增长。并在过去 16 年间先后在 Facebook、新浪微博、联想集团等高科技大厂担任高管职务。 而王清洲则是世界上最早利用谷歌大脑从事深度学习方面研究和应用的工程师之一,曾经在谷歌机器学习研究院长期担任技术负责人,有着超过 15 年的美国硅谷最精尖的软硬件技术开发经验,目前担任行猩科技的 CTO。 此外,行猩科技在美国硅谷和中国上海均设有技术研发中心,研发团队包括系统工程、感知、决策规划、控制、深度增强学习、高精度地图及定位和大数据等各个方向。值得注意的是,该团队成员均来自谷歌、Pony.ai 小马智行、高通、小鹏汽车、博世、采埃孚等行业顶尖公司。L4 级自动驾驶纯电卡车亮相,率先布局智慧物流
新能源和人工智能是中国重点扶持的高科技产业方向,在物流行业的应用也契合节能减排,降本增效的大趋势。 “行猩科技希望提供一张大型的无人电动运力网络,这是智能物流的终局状态。无人电动卡车穿梭在公路上,由行猩来调度和提供虚拟司机,实现无人智能配送。而且我们会采用 Cabless Driverless EV,即没有驾驶室,没有司机的电动车来提供成本最优的物流方案。”赵睿璇表示。 基于这个理念,行猩科技开始着重发力无人电动车。并在成立半年时间内,就率先发布了一款 L4 级自动驾驶纯电厢式重卡物流车 Apebot I,也是目前该车型全球第一款自动驾驶前装的纯电动车型。 图 | 纯电卡车 Apebot I(来源:行猩科技) 据了解,该车为 4x2 厢式货车,车货总重 18 吨,货箱长度为 9.6 米,货箱容积最大可做到 67 立方,是目前物流省内跨城最常用的车型,对于快递快运公司的省内跨仓转运至关重要。 尤其是该车采用了行猩科技创新的电动线控底盘和 L4 级别自动驾驶的前装量产方案。可以更好地满足物流长续航的需求,同时也彰显了行猩科技的整车三电定义及自动驾驶快速研发的实力。
图 | 纯电卡车 Apebot I(来源:行猩科技) 据了解,该车为 4x2 厢式货车,车货总重 18 吨,货箱长度为 9.6 米,货箱容积最大可做到 67 立方,是目前物流省内跨城最常用的车型,对于快递快运公司的省内跨仓转运至关重要。 尤其是该车采用了行猩科技创新的电动线控底盘和 L4 级别自动驾驶的前装量产方案。可以更好地满足物流长续航的需求,同时也彰显了行猩科技的整车三电定义及自动驾驶快速研发的实力。 (来源:行猩科技) 值得注意的是,行猩此次发布的自动驾驶系统还是全球首个在卡车上大规模使用固态激光雷达的自动驾驶方案。目前 Apebot I 已经在做量产前的各种验证测试准备,预计将于 2023 年 2 月量产。发布最新感知系统,助力自动驾驶算法迭代
(来源:行猩科技) 值得注意的是,行猩此次发布的自动驾驶系统还是全球首个在卡车上大规模使用固态激光雷达的自动驾驶方案。目前 Apebot I 已经在做量产前的各种验证测试准备,预计将于 2023 年 2 月量产。发布最新感知系统,助力自动驾驶算法迭代
行猩科技致力于通过最先进的机器学习理论来助力自动驾驶算法的迭代。而且与竞争者相比,行猩科技还拥有一个显著的优势,那就是可通过自主知识产权的自有车辆来获取真实行驶数据。  图 | 行猩科技 CTO 王清洲(来源:行猩科技) “自动驾驶一定要摒弃一半智能,一半人工的方式,靠堆工程师写 rule 来解决极端状况不可行。” 行猩科技 CTO 王清洲介绍道,“因为我们拥有车辆硬件和核心知识产权,我们可以通过真实行驶数据来驱动算法,这对规划模块的迭代来说至关重要。” 目前,行猩科技已发布了基于最先进人工智能算法的感知系统——APANet。感知系统是自动驾驶最重要的核心模块之一,对于其他下游模块以及自动驾驶系统的整体性能都起着非常关键的作用。
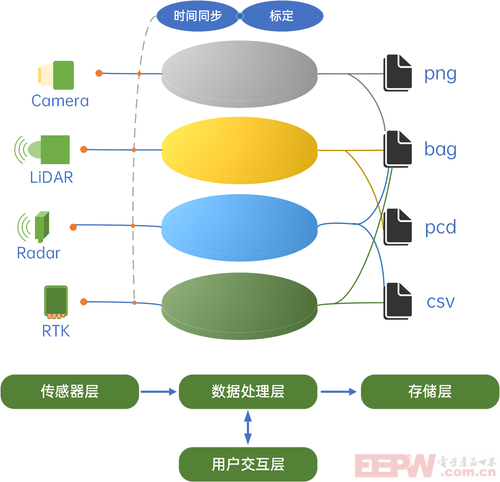
图 | 行猩科技 CTO 王清洲(来源:行猩科技) “自动驾驶一定要摒弃一半智能,一半人工的方式,靠堆工程师写 rule 来解决极端状况不可行。” 行猩科技 CTO 王清洲介绍道,“因为我们拥有车辆硬件和核心知识产权,我们可以通过真实行驶数据来驱动算法,这对规划模块的迭代来说至关重要。” 目前,行猩科技已发布了基于最先进人工智能算法的感知系统——APANet。感知系统是自动驾驶最重要的核心模块之一,对于其他下游模块以及自动驾驶系统的整体性能都起着非常关键的作用。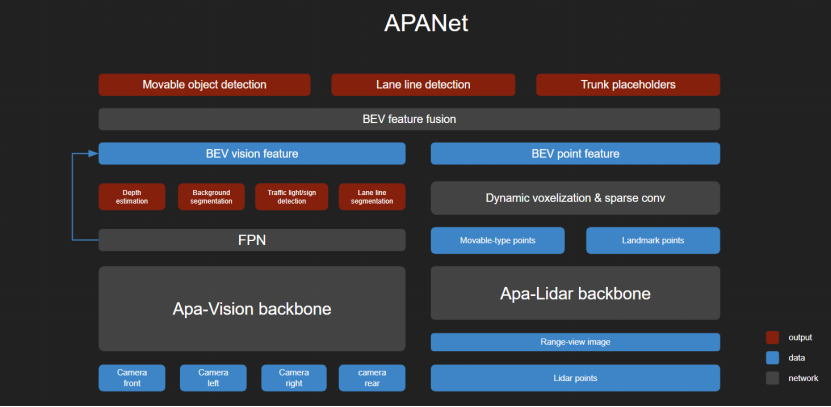 图 | 感知系统 APANet 网络结构示意图(来源:行猩科技) 据了解, APANet 是一个基于最新深度学习技术的多任务网络架构,可以在 Bird’s-Eye View(鸟瞰视角)进行多摄像头和激光雷达等传感器特征级的深度融合。从功能的角度看,APANet 可以同时完成 2D 和 3D 的目标检测、图像语义分割、图像深度估计、和车道线检测等功能。基于 APANet 的网络结构,行猩科技在感知算法上利用数据驱动,大量减少了后处理中基于规则的操作,从而可以在算法角度实现真正的量产。 当前,由于实际路测场景的复杂性,不少自动驾驶公司在实现“去司机”之前,往往都会陷入一个较大的技术瓶颈,即其系统越做越复杂,已经很难再进行系统重构以及引入最前沿的算法。 而行猩科技自研的自动驾驶感知系统 APANet,在此方面则实现了极大的突破。其最突出的优势便是多摄像头与固态激光雷达并重,其鸟瞰图上传感器特征级的融合可以让传感器融合变得可插拔化,既能增强其感知性能,又有利于传感器冗余。 通过视觉图像进行鸟瞰视角的 3D 重建是近两年才拥有重要突破的一个领域,同时也是感知最重要的技术环节。大多数 L4 公司的做法往往是先借助固态激光雷达(LiDAR)建立 3D 模型,借助与高清地图拟合来识别障碍物,而视觉图像更多是用来作为物体识别的一个补充环节。 但是这种方式并不完美,尤其在高速远距离场景中,LiDAR 有限的角分辨率会导致严重的信息丢失。而多摄像头则可以带来更丰富的细节信息,且无论从造价还是性能来说都远远优于 LiDAR。 掌握了多镜头联合 3D 重建技术,不仅对环境信息(车道线、障碍物、标识等)有准确的掌握,还能更好地对移动物体进行跟踪和预测。从而帮助脱离对高清地图的依赖,以更快的速度实现 L4 的量产。 从下图可以看到,无论白天还是夜晚的场景,多摄像头为主感知系统都可以非常清晰地识别出周边的车辆及障碍物,并且可以通过上方的鸟瞰图一目了然掌握周边车辆的移动轨迹。
图 | 感知系统 APANet 网络结构示意图(来源:行猩科技) 据了解, APANet 是一个基于最新深度学习技术的多任务网络架构,可以在 Bird’s-Eye View(鸟瞰视角)进行多摄像头和激光雷达等传感器特征级的深度融合。从功能的角度看,APANet 可以同时完成 2D 和 3D 的目标检测、图像语义分割、图像深度估计、和车道线检测等功能。基于 APANet 的网络结构,行猩科技在感知算法上利用数据驱动,大量减少了后处理中基于规则的操作,从而可以在算法角度实现真正的量产。 当前,由于实际路测场景的复杂性,不少自动驾驶公司在实现“去司机”之前,往往都会陷入一个较大的技术瓶颈,即其系统越做越复杂,已经很难再进行系统重构以及引入最前沿的算法。 而行猩科技自研的自动驾驶感知系统 APANet,在此方面则实现了极大的突破。其最突出的优势便是多摄像头与固态激光雷达并重,其鸟瞰图上传感器特征级的融合可以让传感器融合变得可插拔化,既能增强其感知性能,又有利于传感器冗余。 通过视觉图像进行鸟瞰视角的 3D 重建是近两年才拥有重要突破的一个领域,同时也是感知最重要的技术环节。大多数 L4 公司的做法往往是先借助固态激光雷达(LiDAR)建立 3D 模型,借助与高清地图拟合来识别障碍物,而视觉图像更多是用来作为物体识别的一个补充环节。 但是这种方式并不完美,尤其在高速远距离场景中,LiDAR 有限的角分辨率会导致严重的信息丢失。而多摄像头则可以带来更丰富的细节信息,且无论从造价还是性能来说都远远优于 LiDAR。 掌握了多镜头联合 3D 重建技术,不仅对环境信息(车道线、障碍物、标识等)有准确的掌握,还能更好地对移动物体进行跟踪和预测。从而帮助脱离对高清地图的依赖,以更快的速度实现 L4 的量产。 从下图可以看到,无论白天还是夜晚的场景,多摄像头为主感知系统都可以非常清晰地识别出周边的车辆及障碍物,并且可以通过上方的鸟瞰图一目了然掌握周边车辆的移动轨迹。
动图 | APANet 在开源数据集 NuScenes 上的效果展示(来源:行猩科技) 而在感知的灵敏度上,赵睿璇说,“我们的传感器可以实现 20Hz 以上的感知测算频率,比大多数仍为 10Hz 的传统自动驾驶系统可以更优的检测和预测移动的车辆和障碍物。” 这意味着行猩科技基于电动车底盘的自动驾驶系统,可以更好地结合车辆底盘反馈的状态信息,来更精准的预测周边障碍物的位置和轨迹。 除此之外,基于数据驱动,APANet 也是一个当之无愧的神经网络大模型,其既可以避免模型过多所带来的的功耗忧虑,以及自适应的学习不同障碍物的空间关系,同时也能降低开发成本。 谈及未来发展路径,赵睿璇希望行猩科技可以在为物流降本增效的路径上一直加速前行,更快地搭建下一代无人电动运力网络。
-End-
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。